






Im Lastenrad des Fachbereichs Geodäsie der Hochschule Bochum als Multisensorsystem kommen folgende Sensoren zum Einsatz:
- Ein Laserscanner
- Ein Kamerasystem bestehend aus sechs Kameras
- Eine intertiale Messeinheit (Inertial Measurement Unit; IMU) mit GNSS-Empfänger
- Ein GNSS-Antennen-Array
Darüber hinaus ist das Lastenrad mit einem Toughpad zur Datenaufzeichnung, Steuerung und Überwachung während der Fahrt ausgestattet.
Komponenten
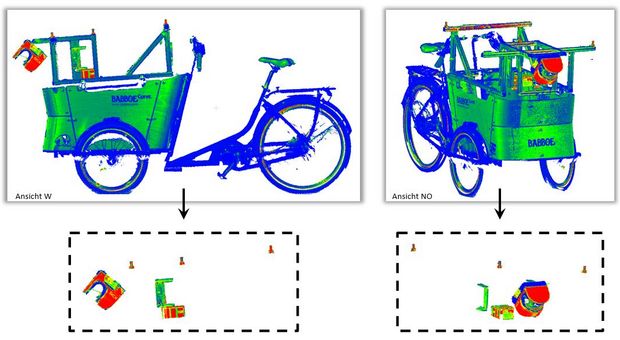
Für die dreidimensionale Erfassung der Umgebung ist ein Profilscanner auf dem Lastenrad montiert.
Dieser misst kontinuierlich die Richtung und Entfernung zur Umgebung. Zusätzlich wird die Intensität des zurückgestrahlten Signals erfasst.
Aus diesen Daten lässt sich eine 3D-Punktwolke der Umgebung erzeugen.
Ergänzend zum Laserscanner wird die Umgebung von sechs Kameras erfasst.
Die Kameras sind wie folgt ausgerichtet:
- Zwei Kameras in Fahrtrichtung
- Zwei Kameras zur rechten Seite
- Zwei Kameras zur linken Seite
Aus den Beobachtungen der beiden GNSS-Empfänger lässt sich die Fahrtrichtung des Lastenrads ableiten.
Die inertiale Messeinheit erfasst kontinuierlich die auf das System einwirkenden Beschleunigungen und Drehraten.
Aus diesen Informationen und den Daten eines GNSS-Empfängers lässt sich mit einer hohen zeitlichen Auflösung die Trajektorie des Lastenrads bestimmen.
Die Trajektorie des Lastenrads wird benötigt, um aus den relativen Entfernungsmessungen des Laserscanners eine 3D-Punktwolke zu erzeugen.