- Angewandte Elektrotechnik
- Angewandte Informatik
- Automatisierungstechnik
- Autonome Systeme
- Elektronik und Signalverarbeitung
- Hardwarenahe IT-Systeme
- ITK-Infrastrukturen und -Dienste
- Konstruktion und CAE
- Mechanik und Fahrzeugdynamik
- Physik und Werkstoffkunde
- Regelungs- und Fahrzeugsystemtechnik
- Softwaretechnik
- Wirtschaftsinformatik
Autonome Systeme
Willkommen bei der Arbeitsgruppe Autonome Systeme an der Hochschule Bochum!
Die Arbeitsgruppe Autonome Systeme am Campus Velbert/Heiligenhaus erforscht und entwickelt innovative Lösungen für intelligente, selbstständige Systeme. Unser Fokus liegt auf Künstlicher Intelligenz, Robotik, maschinellem Sehen und autonomen mobilen Plattformen.
- Wir beschäftigen uns mit grundlegenden und angewandten Fragestellungen in den Bereichen: Autonomes Fahren & Robotik: Entwicklung und Steuerung autonomer Fahrzeuge und mobiler Roboter für verschiedene Einsatzgebiete.
- KI & Maschinelles Lernen: Anwendung neuronaler Netze und lernender Algorithmen zur Wahrnehmung und Entscheidungsfindung.
- Sensorik & Wahrnehmung: Nutzung von Kameras, Lidar, Radar und Tiefensensorik für präzise Umgebungsmodellierung.
- Mensch-Maschine-Interaktion: Entwicklung intelligenter Assistenzsysteme für eine effiziente Zusammenarbeit zwischen Mensch und Maschine.
Unsere Forschung wird durch interdisziplinäre Kooperationen mit Hochschulen, Industriepartnern und internationalen Forschungsnetzwerken gestützt. Wir bieten Studierenden und Wissenschaftlern die Möglichkeit, an zukunftsweisenden Projekten mitzuwirken und die Technologien von morgen aktiv mitzugestalten.


Publikationen
- B. Hadžić, M. Danner, J. N. Peperkorn, P. Mohammed, and M. Rätsch, "AI-supported diagnostic of depression using clinical interviews: A proof of concept," in Proceedings of the 8th International Conference on Human Computer Interaction Theory and Applications (HUCAPP), G. M. Farinella, P. Radeva, and J. Braz, Eds., SCITEPRESS, 2024.
- S. Peng, B. Hadžić, M. Danner, and M. Rätsch, "Panic consumption under public health emergencies: The mediating role of risk perception," Journal of Public Health, Feb. 1, 2024. ISSN: 1613-2238. DOI: 10.1007/s10389-023-02188-6.
- S. Aiguo, M. Danner, Z. Xinjuan, and M. Rätsch, "TFCSG: An unsupervised approach for question-retrieval over multi-task learning," in 2023 62nd Annual Conference of the Society of Instrument and Control Engineers (SICE), IEEE, 2023. DOI: 10.23919/SICE59929.2023.10354081.
- E. A. Brake, M. Danner, G. Kosel, et al., "Approach for digitising the softness of human tissue for implementation in 3D soft avatar clothing simulations," in Proceedings of the 14th International Conference and Exhibition on 3D Body Scanning and Processing Technologies, 2023.
- M. Danner, E. A. Brake, C. Decker, M. Rätsch, Y. Kyosev, and K. Rose, "Evaluation of low-cost 3D scanner hardware for the clothing industry," in Informatics in Control, Automation and Robotics - 20th International Conference (ICINCO 2023), Rome, Italy, November 13-15, 2023, Proceedings, G. Gini, H. Nijmeijer, W. Burgard, and D. P. Filev, Eds., Communications in Computer and Information Science, Springer, 2023.
- M. Danner, B. Hadžić, S. Gerhardt, et al., "Advancing mental health diagnostics: GPT-based method for depression detection," in 2023 62nd Annual Conference of the Society of Instrument and Control Engineers (SICE), IEEE, 2023. DOI: 10.23919/SICE59929.2023.10354236.
- M. Danner, B. Hadžić, R. Radloff, et al., "Overcome ethnic discrimination with unbiased machine learning for facial data sets," in Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023), Volume 5: VISAPP, Lisbon, Portugal, February 19-21, 2023, P. Radeva, G. M. Farinella, and K. Bouatouch, Eds., SCITEPRESS, 2023, pp. 464–471. DOI: 10.5220/0011624900003417.
- M. Danner, B. Hadžić, T. Weber, X. Zhu, and M. Rätsch, "Towards equitable AI in HR: Designing a fair, reliable, and transparent human resource management application," in Deep Learning Theory and Applications - 4th International Conference (DeLTA 2023), Rome, Italy, July 13-14, 2023, Proceedings, D. Conte, A. L. N. Fred, O. Gusikhin, and C. Sansone, Eds., Communications in Computer and Information Science, vol. 1875, Springer, 2023, pp. 308–325. DOI: 10.1007/978-3-031-39059-3_21.
- M. Danner, P. Huber, M. Awais, M. Rätsch, and J. Kittler, "GAN-powered model & landmark-free reconstruction: A versatile approach for high-quality 3D facial and object recovery from single images," in Deep Learning Theory and Applications - 4th International Conference (DeLTA 2023), Rome, Italy, July 13-14, 2023, Proceedings, D. Conte, A. L. N. Fred, O. Gusikhin, and C. Sansone, Eds., Communications in Computer and Information Science, vol. 1875, Springer, 2023, pp. 403–418. DOI: 10.1007/978-3-031-39059-3_27.
- X. Su, J. Duan, J. Ren, et al., "Personalized clothing recommendation fusing the 4-season color system and users’ biological characteristics," Multimedia Tools and Applications, pp. 1–29, 2023. DOI: 10.1007/s11042-023-16014-4.
- M. Danner, T. Weber, P. Huber, M. Awais, M. Rätsch, and J. Kittler, "Evolutional normal maps: 3D face representations for 2D-3D face recognition, face modelling, and data augmentation," in Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022), Volume 5: VISAPP, SCITEPRESS, 2022, pp. 267–274. DOI: 10.5220/0010912000003124.
- T. Weber, M. Danner, B. Zhang, M. Rätsch, and A. Zell, "Semantic risk-aware costmaps for robots in industrial applications using deep learning on abstracted safety classes from synthetic data," in Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022), Volume 4: VISAPP, SCITEPRESS, 2022, pp. 984–990. DOI: 10.5220/0010904100003124.
- M. Danner, T. Weber, L. P. Peng, T. Gerlach, X. Su, and M. Rätsch, "Ethically aligned deep learning: Unbiased facial aesthetic prediction," CoRR, vol. abs/2111.05149, 2021. arXiv: 2111.05149.
- M. Danner, P. Huber, M. Awais, Z. Feng, J. Kittler, and M. Rätsch, "Texture-based 3D face recognition using deep neural networks for unconstrained human-machine interaction," in Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020), Volume 5: VISAPP, SCITEPRESS, 2020, pp. 420–427. DOI: 10.5220/0008982504200427.
- T. Weber, S. Triputen, M. Danner, et al., "Follow me: Real-time in the wild person tracking application for autonomous robotics," in RoboCup 2017: Robot World Cup XXI, Springer, 2017, pp. 156–167. DOI: 10.1007/978-3-030-00308-1_13.
Lehrveranstaltungen im Rahmen der Bachelor-Ausbildung am Campus Velbert-Heiligenhaus:
- Grundlagen der Informatik
- Grundlagen der Rechnertechnik
- Grundlagen Robotik
- Vertiefung Robotik
Lehrveranstaltungen im Rahmen der Master-Ausbildung am Campus Velbert-Heiligenhaus:
- Robotics
- Wissenschaftliches Schreiben
SpherRobs - Kugelrobote

Das SpheRobs (Spherical Robotics) Projekt erforscht neuartige Ansätze aus der Informatik im Themenfeld verteilte Robotersysteme. Eingesetzt werden vor allem Verfahren aus dem Bereich der künstlichen Intelligenz, Regelungstechnik und Bilddatenverarbeitung. Ziel ist hierbei von der reinen Simulation zu einer Demonstration auf realer Roboterhardware zu gelangen und auch diese auch in der unstrukturierten menschlichen Umgebung umzusetzen. Zu diesem Zweck werden sogenannte Kugelroboter im Roboter- und Rechnertechnik Labor für die Implementierung verwendet. Kugelroboter sind kugelförmige Roboter, die durch die Verschiebung ihres Schwerpunktes in der Lage sind, in eine beliebige Richtung zu rollen.
Videos:
- Box pushing problem solved by spherical robot
- Collaborative box-pushing
- Position control with three spherical robots - Keeping a simple formation
- Control of spherical mobile robots under environmental disturbances
Veröffentlichungen
TicTacToe Roboter
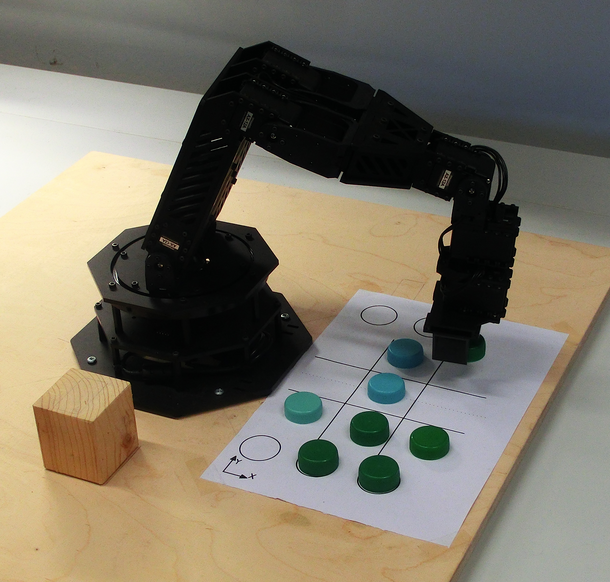
Im Rahmen verschiedener Studentenprojekte wurde einem PhantomX Reactor Roboterarm von Trossen Robotics das Spiel Tic Tac Toe beigebracht. Da Tic Tac Toe ein Spiel mit vollständiger Information ist, spielt der Roboter stets ein perfektes Spiel. Der menschliche Gegenspieler kann nie gewinnen, sondern maximal ein Unentschieden erreichen. Videos zur aktuellen Version finden sich hier: https://youtu.be/ciLn0i36-t0
Für die Umsetzung der Software haben die Studenten an folgenden Hauptthemen gearbeitet:
- Kinematik: Modellierung des Roboters mit dem Denavit-Hartenberg Verfahren
- Bilddatenverarbeitung: Erkennung der Spielsituation mit Hile einer Webcam
- Künstliche Intelligenz: Berechnung des nächsten Zuges mit dem MinMax Verfahren
Alle Informationen zu laufenden Veranstaltungen werden auf der Plattform moodle bekanntgegeben.
Leiter der Arbeitsgruppe
Projekt- und Abschlussarbeiten
Wenn Sie Interesse an einer Projekt-, Bachelor- oder Master-Arbeit auf dem Gebiet der technischen Informatik haben, sprechen Sie uns an.