Steuerung von Pokerchips über ein Smartphone
Ein starkes Projekt über Veranstaltungsgrenzen hinweg beschäftigte mehrere Studierende im letzten Semester. Ein reales Beispiel von Arbeitsteilung und Teamarbeit live und in der Praxis. Und das Ergebnis lässt sich sehen!
Betreut wurden die Studierenden von Prof. Dietmar Gerhardt und Prof. Clemens Faller.
Die Aufgabe
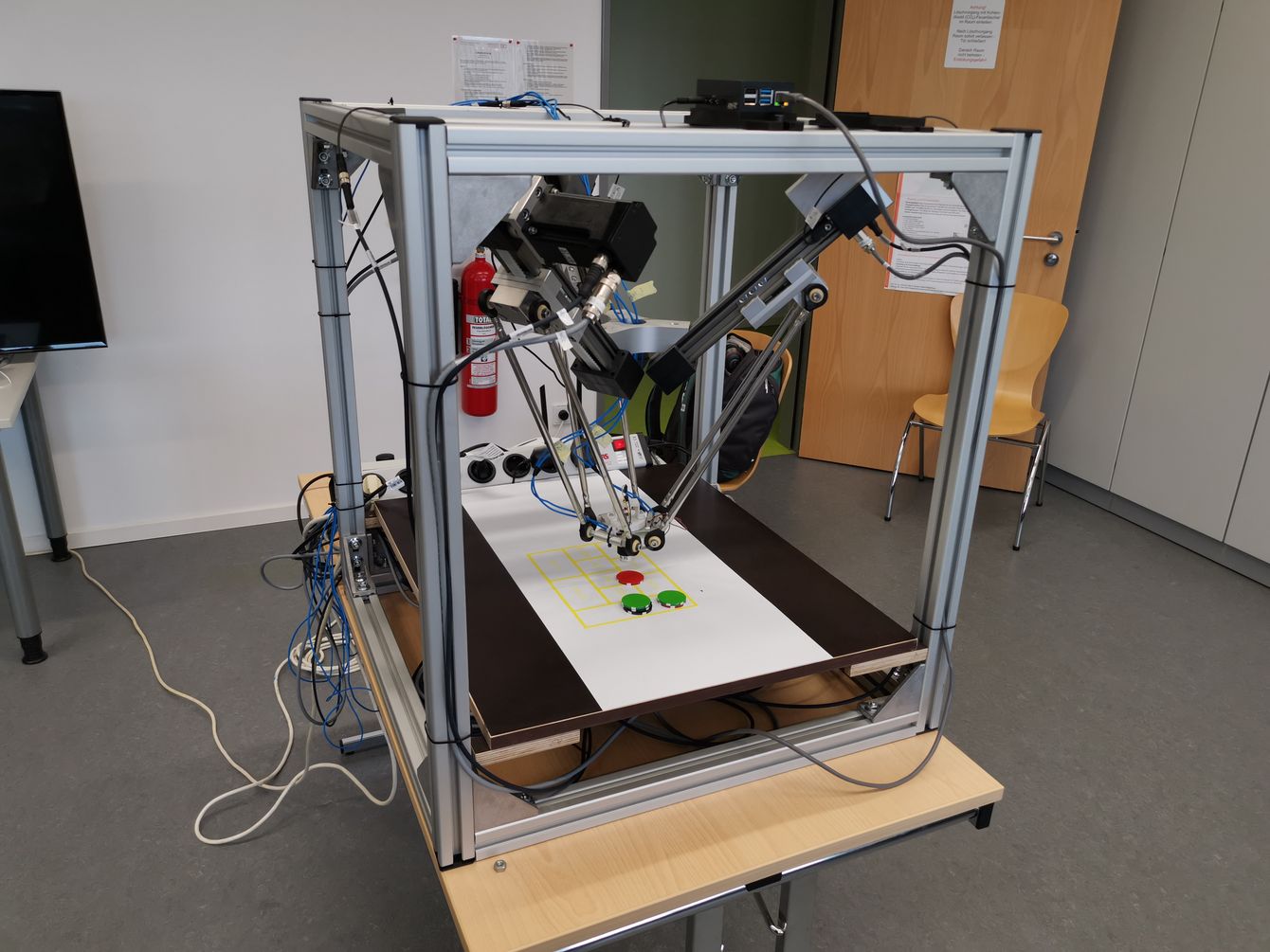
Die Chips auf einem Pokertisch sollen über einen IGUS-Robotor auf das Spielfeld gesetzt werden.
Die Steuerung, welcher Chip auf welches Feld gesetzt wird, soll über eine Webseite erfolgen, die von einem PC oder von einem Smartphone aufgerufen wird.
Das Vorgehen
- Im Modul Automatisierungstechnik 2 haben die Studierenden einen IGUS-Roboter programmiert, so dass dieser über ein Kamerasystem mit einem RaspberryPi die Pokerchips lokalisiert und diese auf das gewünschte Feld gesetzt werden.
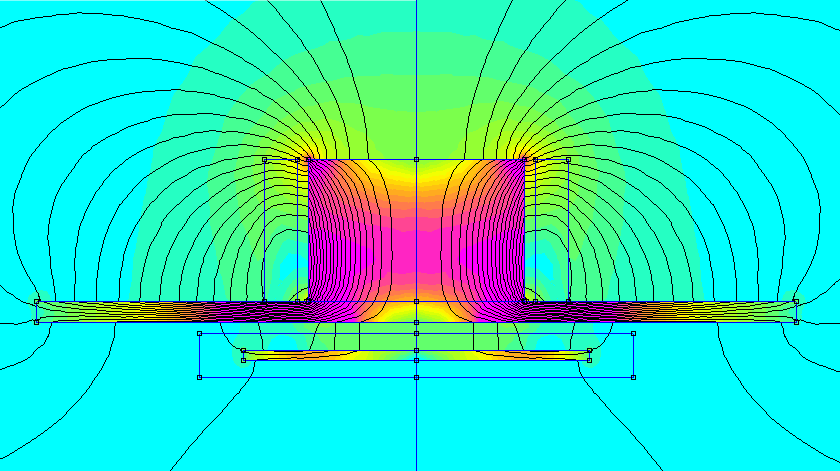
- Um einschätzen zu können, welcher Elektromagnet erforderlich ist, um den Pokerchip sicher anzuheben, wurde die Aufgabe an Studierende im Modul Sensortechnik und digitale Signalverarbeitung weitergegeben. Für die Auslegung des Hubmagneten haben die Studierenden über eine FEM-Simulation geprüft, wie genau der Elektromagnet auszulegen ist, damit ein Pokerchip sicher angehoben wird. Dazu macht das FEM-Programm die magnetischen Feldlinien sichtbar und berechnet die Kraft, mit der der Pokerchip vom Elektromagneten angezogen wird.
Da die Erkennung des Chips mit der Kamera nicht sicher funktionierte, haben sich Studierende im Modul Digitale Bildverarbeitung intensiver mit der Lokalisation und Farberkennung der Pokerchips per Kamera beschäftigt. Dazu mussten gelernte Verfahren aus der Bildverarbeitung für diesen speziellen Fall angepasst werden. Die Studierenden haben verschiedene Verfahren getestet und weiterentwickelt. Es wurde immer wieder in der Veranstaltung diskutiert, so dass letztlich das beste Verfahren in das System implementiert wurde und nun erfolgreich läuft.
Im Ergebnis konnte die Aufgabenstellung komplett erfüllt werden!

Das Highlight
Erst die Zusammenarbeit über die drei Veranstaltungen hat zum gewünschten Erfolg geführt. Das hat den Studierenden großen Spaß gemacht. Einige Studierende haben in zwei oder drei Vorlesungen mit gearbeitet und konnten so das Projekt aus verschiedenen Fachrichtungen verfolgen und weiter bearbeiten.
Theoretisches Wissen, das als Grundlage diente
- Programmierung eines Roboters
- Methoden zur Bildverarbeitung (Kreiserkennung, Unterscheidung von Farben)
- Nachbau eines Hubmagneten in einer Simulation. Beurteilen von physikalischen Eigenschaften in der Simulation.