Anleitungen und Lehrmaterialien
Getting Started
Miniforge ist eine minimale Python-Distribution mit dem Open-Source-Paketmanager Conda und Mamba und Conda-Forge als Default Repository. Mamba ist eine kompatible, aber schnellere Alternative zu Conda um Pakete zu installieren. Das Conda-Forge Repository wird als Community-Projekt gepflegt und enthält immer aktuelle Pakete für Maschinelles Lernen und Data Science, die es Entwickler:innen und Data Scientists ermöglicht, ihre Anwendungen und Algorithmen einfach zu entwickeln, zu testen und bereitzustellen. Die Plattform bietet eine umfassende Sammlung von Tools und Bibliotheken für die Datenanalyse, wie z.B. NumPy, Pandas, Matplotlib und Jupyter Notebook.
Hier finden Sie die von Christof Kaufmann erstellte Installationsanleitung (Windows | Linux).

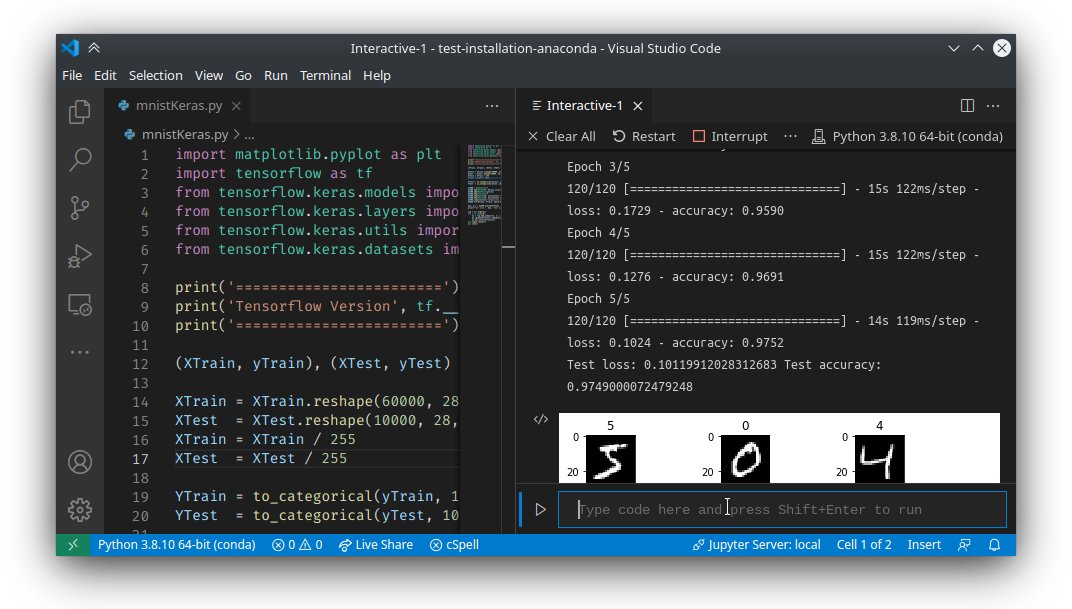
Mit dem AKIS CPU/GPU-Cluster steht unter jupyter.hs-bochum.de für die ganze Hochschule eine Python-Umgebung im Webbrowser bereit. Für ausgewählte Kurse z. B. für das Training neuronaler Netze kann der Zugriff auf die GPUs (32x RTX 3080) gewährt werden.
Hier finden Sie einen kurzen Einstieg mit vielen Screenshots.

Hier stehen Unterlagen für Grundlagenvorlesungen zu Python bereit. Die Themen sind sehr feingranular (z. B. "Verzweigungen" und "Schleifen") um modularer zu sein als klassische Vorlesungen. Die Übungen stehen in verschiedenen Formaten bereit:
- Die Folien sind als PDF verfügbar und lassen sich für Änderungen in PowerPoint öffnen. (sciebo-Link)
- Bei Bedarf kann ggf. auch auf die LaTeX-Quelldateien zugegriffen werden, um daraus angepasste Folien zu erstellen.
- Jupyter-Notebooks: Jede Aufgabe gibt es als separates Jupyter-Notebook um direkt loslegen zu können. (Download-Link, Repo-Link, Jupyter-Server-Link zu allen Aufgaben, Jupyter-Server-Link zu einer Beispielaufgabe, -Lösung)
- PDF-Aufgaben- und Lösungsbätter mit begleitenden Python-Dateien. (sciebo-Link)

Carla ist eine Open-Source-Simulationsplattform für autonomes Fahren, die die Entwicklung, das Training und die Validierung von autonomen Fahrsystemen ermöglicht. Carla ist für Windows- und Linux-Systeme konzipiert und lässt sich über eine gut strukturierte Python-API (2.7 & 3 auf Linux, nur Python 3 auf Windows) betreiben. Die flexibel konfigurierbare Umgebung von Carla macht es sehr attraktiv, z. B. lassen sich verschiedene Fahrumgebungen (Stadt, Dorf usw.), Wetterbedingungen (klarer Mittag, bewölkter Mittag, nasser bewölkter Mittag, mittlerer Regen Mittag, starker Regen Mittag) oder sogar Fahrzeugbeleuchtungen (Standlicht, Abblend-/Fernlicht, Bremslicht, rechte/linke Blinker, Innenbeleuchtung) einstellen. Darüber hinaus bietet Carla neben Fahrzeugen auch zahlreiche Verkehrsteilnehmer wie Fußgänger, Fahrzeugsensoren, Verkehrszeichen, Ampeln und vieles mehr, welche es zu einem beeindruckend realitätsnahen Werkzeug macht.
Hier finden Sie die von Basile Tousside erstellte Installationsanleitung zu CARLA (Deutsch | Englisch).
Webots ist ein Open-Source-Robotersimulator, der für die Simulation und Testung von Robotern verwendet wird. Es unterstützt eine Vielzahl von Roboterplattformen und Protokollen und ermöglicht es Benutzer:innen, virtuelle Umgebungen zu erstellen und Roboter darin zu testen. Webots bietet auch eine intuitive grafische Benutzeroberfläche und eine Programmierschnittstelle, mit der Benutzer:innen ihre eigenen Regler und Steuerungen entwickeln und testen können.
Webots wird aktuell beispielsweise für eine Aufgabe im Rahmen von SharKI benutzt. Bei der Aufgabe bekommen die Studierenden ein simuliertes Labyrinth mit beweglichen Hindernissen und sollen einen Algorithmus implementieren, welcher einen Pfad durch das Labyrinth plant.
Hier geht es zum Download von Webots. Für Anleitung besuchen Sie die Webots Guided Tour im Hilfe-Menü von Webots.

- Accounts für die Pro-Version von Overleaf können ab Juli bei der Campus IT beantragt werden
(Klicke auf das Banner oben) - Kurzanleitung für LaTeX und Overleaf-Tastaturkürzel: https://www.overleaf.com/for/community/resources
- Kostenlose Webinar-Reihe: https://www.overleaf.com/events/webinars
- Die Levels und Themen variieren und Sie finden Registrierungsinformationen für bevorstehende Webinare zusammen mit aufgezeichneten Versionen für Play-on-Demand
Hier geht es nach Overleaf: https://www.overleaf.com
Bei technischen Fragen zum Konto oder zur Funktionalität: support(at)
Labore und Makerspaces
KI-Raum

Der KI-Raum bietet Studierenden und Forschenden eine ideale Umgebung, um praxisnah mit künstlicher Intelligenz (KI) zu arbeiten. Ausgestattet mit acht leistungsstarken Rechnern, ermöglicht dieser Raum die Bearbeitung komplexer KI-Projekte und rechenintensiver Datenanalysen. Zudem besteht die Möglichkeit, sich mit den Rechnern auch aus der Ferne, beispielsweise von zu Hause, zu verbinden.
Kontakt:
Prof. Dr. Christian Bockermann (Institutsleiter)
Hochschule Bochum
Campus Bochum - Raum AW 01-32
Fachgebiet Wirtschaftsinformatik und Data Science
Am Hochschulcampus 1
44801 Bochum
E-Mail: christian.bockermann@hs-bochum.de
Tel.: +49 234 3210655